![]() Topic
Topic
Seafloor Mapping
Ocean Motion; the Attitude Sensor Project
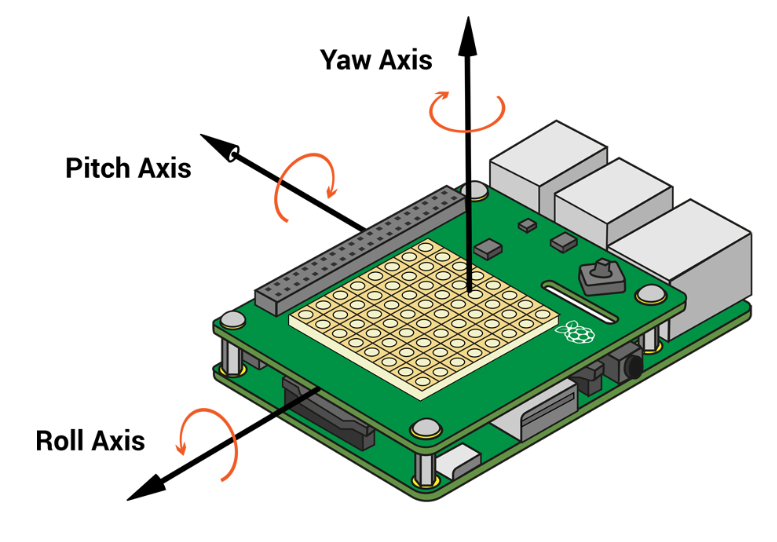
How E/V Nautilus responds to open ocean waves and its orientation called the ship’s attitude. Sensors on the ship work to collect the variables of heave (up and down motion), pitch (front to back seesaw motion), and roll (side to side motion) of the vessel.
In this project, learn to build a Raspberry Pi©-powered sensor to collect pitch and roll data of your platform, just like the attitude sensor on Nautilus!